Системы самонаведения
Самонаведением называется автоматическое наведение ракеты на цель, основанное на использовании энергии, идущей от цели к ракете.
Головка самонаведения ракеты автономно осуществляет сопровождение цели, определяет параметр рассогласования и формирует команды управления ракетой.
По виду энергии, которую излучает или отражает цель, системы самонаведения разделяются на радиолокационные и оптические (инфракрасные или тепловые, световые, лазерные и др.).
В зависимости от места расположения первичного источника энергии системы самонаведения могут быть пассивными, активными и полуактивными.
При пассивном самонаведении энергия, излучаемая или отражаемая целью, создается источниками самой цели или естественным облучателем цели (Солнцем, Луной). Следовательно, информация о координатах и параметрах движения цели может быть получена без специального облучения цели энергией какого-либо вида.
Система активного самонаведения характеризуется тем, что источник энергии, облучающий цель, устанавливается на ракете и для самонаведения ЗУР используется отраженная от цели энергия этого источника.
При полуактивном самонаведении цель облучается первичным источником энергии, расположенным вне цели и ракеты (ЗРК «Хок»).
Радиолокационные системы самонаведения получили широкое распространение в ЗРК из-за их практической независимости действия от метеорологических условий и возможности наведения ракеты на цель любого типа и на различные дальности. Они могут использоваться на всем или только на конечном участке траектории зенитной управляемой ракеты, т. е. в сочетании с другими системами управления (системой телеуправления, программного управления).
В радиолокационных системах применение пассивного способа самонаведения весьма ограничено. Такой способ возможен лишь в частных случаях, например при самонаведении ЗУР на самолет, имеющий на своем борту непрерывно работающий радиопередатчик помех. Поэтому в радиолокационных системах самонаведения применяют специальное облучение («подсвечивание») цели. При самонаведении ракеты на всем участке ее траектории полета к цели, как правило, по энергетическим и стоимостным соотношениям применяются полуактивные системы самонаведения. Первичный источник энергии (радиолокатор подсвета цели) обычно располагается на пункте наведения. В комбинированных системах применяются как полуактивная, так и активная системы самонаведения. Ограничение по дальности активной системы самонаведения происходит за счет максимальной мощности, которую можно получить на ракете с учетом возможных габаритов и массы бортовой аппаратуры, в том числе и антенны головки самонаведения.
Если самонаведение начинается не с момента старта ракеты, то с увеличением дальности стрельбы ракетой энергетические преимущества активного самонаведения по сравнению с полуактивным возрастают.
Для вычисления параметра рассогласования и выработки команд управления следящие системы головки самонаведения должны непрерывно отслеживать цель. При этом формирование команды управления возможно при сопровождении цели только по угловым координатам. Однако такое сопровождение не обеспечивает селекцию цели по дальности и скорости, а также защиту приемника головки самонаведения от побочной информации и помех.
Для автоматического сопровождения цели по угловым координатам используются равносигнальные методы пеленгации. Угол прихода отраженной от цели волны определяется сравнением сигналов, принятых по двум или более несовпадающим диаграммам направленности. Сравнение может осуществляться одновременно или последовательно.
Наибольшее распространение получили пеленгаторы с мгновенным равносигнальным направлением, в которых используется суммарно-разностный способ определения угла отклонения цели. Появление таких пеленгационных устройств обусловлено в первую очередь необходимостью повышения точности систем автоматического сопровождения цели по направлению. Такие пеленгаторы теоретически не чувствительны к амплитудным флюктуациям отраженного от цели сигнала.
В пеленгаторах с равносигнальным направлением, создаваемым путем периодического изменения диаграммы направленности антенны, и, в частности, со сканирующим лучом, случайное изменение амплитуд отраженного от цели сигнала воспринимается как случайное изменение углового положения цели.
Принцип селекции цели по дальности и скорости зависит от характера излучения, которое может быть импульсным или непрерывным.
При импульсном излучении селекция цели осуществляется, как правило, по дальности с помощью стробирующих импульсов, открывающих приемник головки самонаведения в момент прихода сигналов от цели.
Рис. 5. Радиолокационная полуактивная система самонаведения 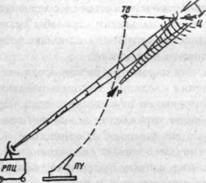
При непрерывном излучении сравнительно просто осуществить селекцию цели по скорости. Для сопровождения цели по скорости используется эффект Доплера. Величина доплеровского смещения частоты сигнала, отраженного от цели, пропорциональна при активном самонаведении относительной скорости сближения ракеты с целью, а при полуактивном самонаведении - радиальной составляющей скорости цели относительно наземного радиолокатора облучения и относительной скорости сближения ракеты с целью. Для выделения доплеровского смещения при полуактивном самонаведении на ракете после захвата цели необходимо произвести сравнение сигналов, принятых радиолокатором облучения и головкой самонаведения. Настроенные фильтры приемника головки самонаведения пропускают в канал изменения угла только те сигналы, которые отразились от цели, движущейся с определенной скоростью относительно ракеты.
Применительно к зенитному ракетному комплексу типа «Хок» она включает радиолокатор облучения (подсвета) цели, полуактивную головку самонаведения, зенитную управляемую ракету и др.
Задачей радиолокатора облучения (подсвета) цели является непрерывное облучение цели электромагнитной энергией. В радиолокационной станции используется направленное излучение электромагнитной энергии, что требует непрерывного сопровождения цели по угловым координатам. Для решения других задач обеспечивается также сопровождение цели по дальности и скорости. Таким образом, наземная часть системы полуактивного самонаведения представляет собой радиолокационную станцию с непрерывным автоматическим сопровождением цели.
Полуактивная головка самонаведения устанавливается на ракете и включает координатор и счетно-решающий прибор. Она обеспечивает захват и сопровождение цели по угловым координатам, дальности или скорости (или по всем четырем координатам), определение параметра рассогласования и выработку команд управления.
На борту зенитной управляемой ракеты устанавливается автопилот, решающий те же задачи, что и в командных системах телеуправления.
В состав зенитного ракетного комплекса, использующего систему самонаведения или комбинированную систему управления, входят также оборудование и аппаратура, обеспечивающие подготовку и пуск ракет, наведение радиолокатора облучения на цель и т. п.
Инфракрасные (тепловые) системы самонаведения зенитных ракет используют диапазон волн, как правило, от 1 до 5 мкм. В этом диапазоне находится максимум теплового излучения большинства воздушных целей. Возможность применения пассивного способа самонаведения - основное преимущество инфракрасных систем. Система делается более простой, а ее действие - скрытым от противника. До пуска ЗУР воздушному противнику труднее обнаружить такую систему, а после пуска ракеты создать ей активную помеху. Приемник инфракрасной системы конструктивно может быть выполнен намного проще приемника радиолокационной ГСН.
Недостаток системы - зависимость дальности действия от метеорологических условий. Тепловые лучи сильно затухают при дожде, в тумане, в облаках. Дальность действия такой системы также зависит от ориентации цели относительно приемника энергии (от направления приема). Лучистый поток из сопла реактивного двигателя самолета значительно превышает лучистый поток его фюзеляжа.
Тепловые головки самонаведения получили широкое распространение в зенитных ракетах ближнего боя и малой дальности.
Световые системы самонаведения основаны на том, что большинство воздушных целей отражает солнечный или лунный свет значительно сильнее, чем окружающий их фон. Это позволяет выделить цель на данном фоне и навести на нее зенитную ракету с помощью ГСН, осуществляющей прием сигнала в диапазоне видимой части спектра электромагнитных волн.
Достоинства данной системы определяются возможностью применения пассивного способа самонаведения. Ее существенный недостаток - сильная зависимость дальности действия от метеорологических условий. При хороших метеорологических условиях световое самонаведение невозможно также в направлениях, где в поле зрения угломера системы попадает свет Солнца и Луны.